
In the realm of robotics, the potential of teams of robots working together has been a topic of great interest. The idea of multiple robots collaborating to accomplish complex missions opens up a plethora of possibilities, such as covering vast distances in shorter timeframes, exploring multiple sites simultaneously, or monitoring large geographical areas effectively. Recent advancements in the field have led to the development of platforms specifically tailored for multi-robot applications. One such platform, the Cambridge RoboMaster, introduced by researchers at the University of Cambridge, stands out as a promising tool for advancing research in this area.
The Cambridge RoboMaster platform is designed to facilitate research in collective intelligence within multi-robot and multi-agent systems. Led by Principal Investigator Amanda Prorok, the team behind this platform has incorporated cutting-edge methods from machine learning, planning, and control to enable a wide range of applications, including automated transport, logistics, environmental monitoring, and search and rescue operations. With a focus on robustness and capability, the researchers set out to create a platform that could support their research endeavors effectively.
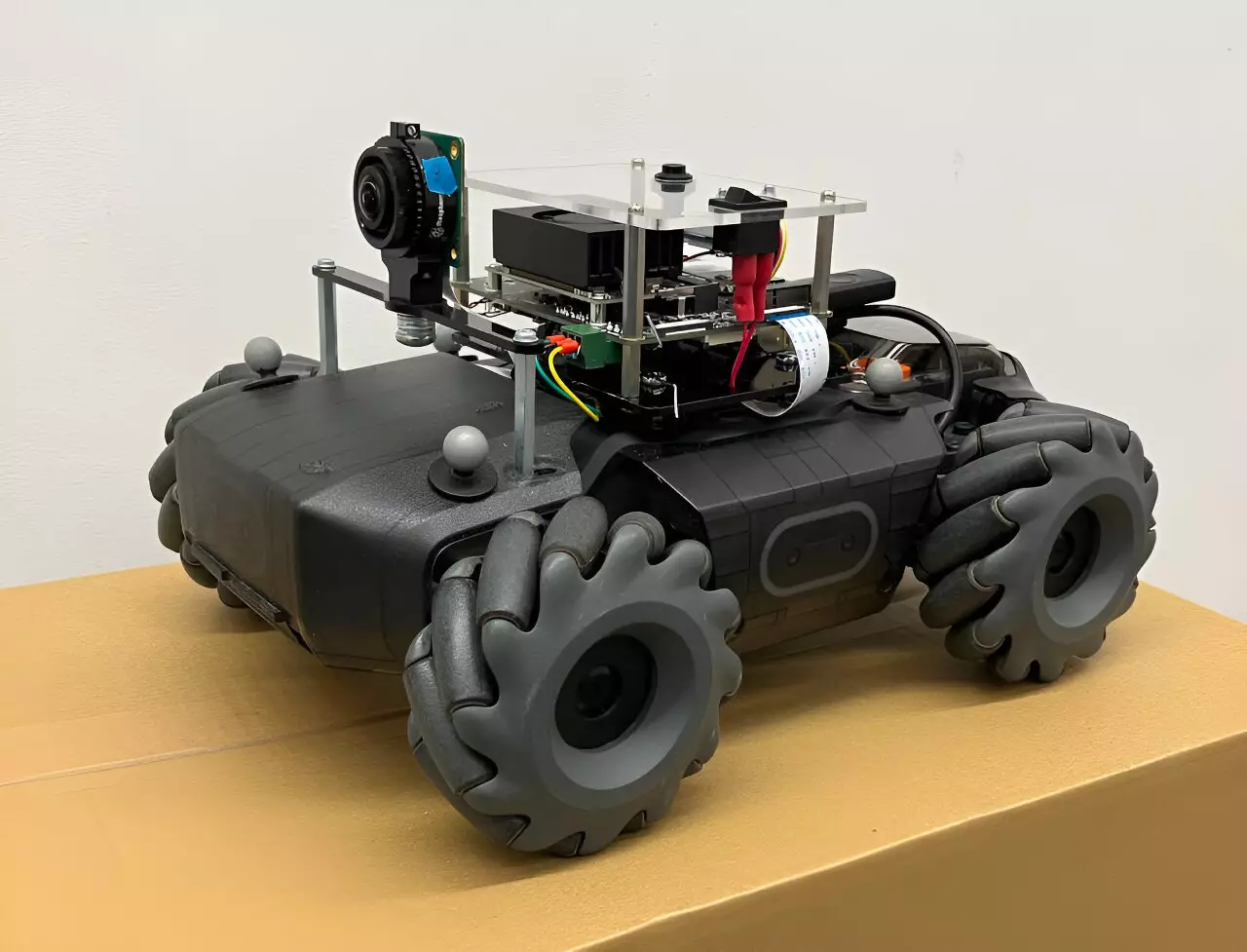
To meet the requirements for state-of-the-art computing power, speed, agility, and durability, the team opted to use customized versions of the DJI RoboMaster S1 robots. Originally designed for high school and university-level competitions, these wheeled robots provided a solid foundation that the researchers could build upon. Over the course of three years, the platform underwent continuous enhancements, with improvements made to the hardware, software, and control systems. The resulting Cambridge RoboMaster platform boasts enhanced computing capabilities and agility, making it a suitable testbed for multi-robot experiments in indoor environments.
One of the key advantages of the Cambridge RoboMaster platform is its balance between size and capabilities. By overcoming the limitations of both small and large robots, the platform offers a cost-effective solution for researchers. With a focus on affordability, advanced capabilities, and versatility, the platform serves as an ideal tool for a wide range of research demonstrations and practical applications in multi-agent systems. The inclusion of a control stack for full onboard autonomy and peer-to-peer communication further enhances the platform’s utility.
The Cambridge RoboMaster platform has already been put to the test in various experiments, showcasing its power-efficiency and versatility. From navigating indoor environments to smooth outdoor terrains, the robots have proven their adaptability in different scenarios. While the platform is not intended for direct use in real-world settings, it serves as a valuable proxy for testing algorithms relevant to multi-agent navigation, with potential applications in warehouse automation, logistics, and more. The platform’s affordability and accessibility make it a valuable asset for universities and robotics labs worldwide.
Looking ahead, the researchers behind the Cambridge RoboMaster platform have ambitious plans for further advancements. By focusing on enhancing onboard sensing, decentralized communication, and control capabilities, they aim to push the boundaries of multi-robot and multi-agent systems research. Additionally, the platform could serve as a bridge for deploying research to drones, opening up new possibilities for exploring the intersection of robotics and aerial systems. As the platform continues to evolve, it holds the promise of driving innovation in the field of multi-robot research.
Leave a Reply