
The field of robotics has seen significant advancements in recent years, particularly in the development of robotic grippers that can pick up and manipulate various objects. However, many of these grippers are complex and expensive, limiting their widespread use in energy-efficient and cost-effective robots. Researchers at Purdue University and MIT have taken a different approach, creating a simpler yet highly effective robotic gripper that bridges the gap between high degree of freedom (DOF) dexterous robotic hands and traditional one DOF parallel-jaw grippers.
The robotic gripper developed by the research team has 5 DOF and is designed with simplicity and efficiency in mind. Unlike traditional high DOF robotic hands that are challenging to program and control, this new gripper is easier to manage through programming tools. It consists of two fingers attached to a gripper base, with a small vision-based tactile sensor mounted on one of the fingers. This design allows for human-like in-hand manipulations by utilizing sensory data from the tactile sensor.
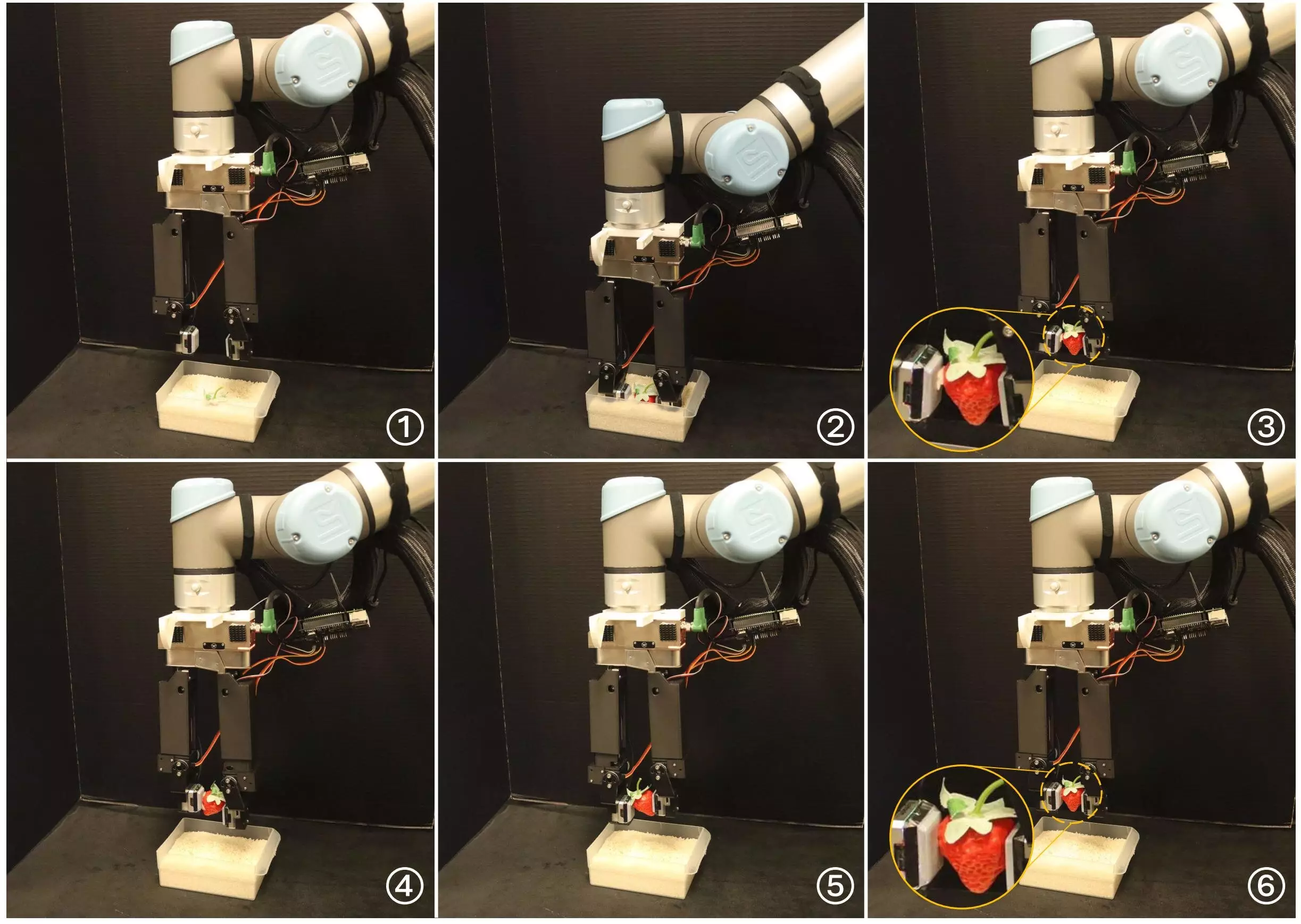
The gripper’s simple yet effective design allows for a high level of dexterity during in-hand manipulation tasks, despite having fewer DOF compared to humanoid robotic hands. Through a combination of linear actuators and rotational servo motors, the gripper can perform intricate object manipulation tasks such as singulation and scooping. In real-world experiments, the gripper demonstrated superior manipulation skills, showcasing its potential for a wide range of applications.
The development of this new robotic gripper opens up possibilities for the creation of more cost-effective and energy-efficient robotic solutions. By simplifying the controller design and enhancing overall efficiency, this gripper could revolutionize the field of object manipulation in robotics. The research team plans to further explore the capabilities of the gripper and apply it to more challenging manipulation tasks in the future. Their innovative approach could inspire the development of similar robotic systems aimed at enhancing object manipulation capabilities in a variety of industries.
The new robotic gripper design introduced by the research team represents a significant advancement in the field of robotics. By combining simplicity with efficiency, this gripper offers a new approach to object manipulation that could potentially revolutionize the way robots interact with the world around them. With further research and development, this gripper has the potential to enhance the capabilities of robotic systems and pave the way for new applications in industries ranging from manufacturing to healthcare.
Leave a Reply