
At first glance, tasks that seem trivial to humans, like retrieving an item from a cluttered shelf, involve an intricately woven tapestry of cognitive functions. When a person reaches for a book or a trinket, their brain engages in a real-time assessment of spatial relationships, potential obstacles, and a myriad of sensory inputs. This agile adaptability is something that robots have historically struggled to replicate. In robotics, motion planning refers to the algorithmic process that guides a machine in moving an object from one location to another while avoiding impediments. However, traditional motion planning methods can be inefficient and cumbersome, necessitating exhaustive evaluations of potential collisions across countless scenarios before a robot can act.
In a bid to tackle these challenges, researchers at Carnegie Mellon University’s Robotics Institute have unveiled a pioneering concept termed Neural Motion Planning. This innovative method aims to significantly enhance how robots interact with dynamic, unpredictable environments. By leveraging the capabilities of a single, multifaceted artificial intelligence network, researchers are equipping robots with the ability to perform motion planning across varied household settings, such as kitchens and living rooms. The implications of such advancements could be vast, particularly in contexts where the robots must navigate unstructured or complex situations where conventional methods falter.
Murtaza Dalal, a doctoral student at the Robotics Institute, articulated the essence of the challenge: “When deploying a robot, it’s crucial to ensure seamless operation within environments where prior knowledge may be incomplete or non-existent.” Traditional algorithms typically rely on pre-established configurations, making them slow and cumbersome as they must conduct extensive collision checks. Neural Motion Planning flips this paradigm by enabling robots to learn through simulated experiences, mirroring the human acquisition of new skills brought about through practice and adaptation.
An essential aspect of Neural Motion Planning is its basis in human cognitive development – the transition from slow, tentative movements to swift, confident actions. This was operationalized through extensive simulations that involved exposing robotic systems to a multitude of household environments, complete with various unusual encounters—everything from navigating around a distracted puppy to sidestepping decorative vases. Through this methodology, robots accumulated experiential data that allowed them to develop a generalist approach to tasks.
During this training, robots encountered not just static objects, but dynamic scenarios requiring faster decision-making and adaptability. This breadth of simulated experience culminated in an artificial intelligence model capable of executing generalizable tasks in real-world situations that had not been explicitly included in its training data. Deepak Pathak, the Raj Reddy Assistant Professor at the Robotics Institute, encapsulated the significance of these findings: “Although we have witnessed tremendous advancements in large-scale learning paradigms within domains like vision and language, the domain of robotics has lagged behind until now.”
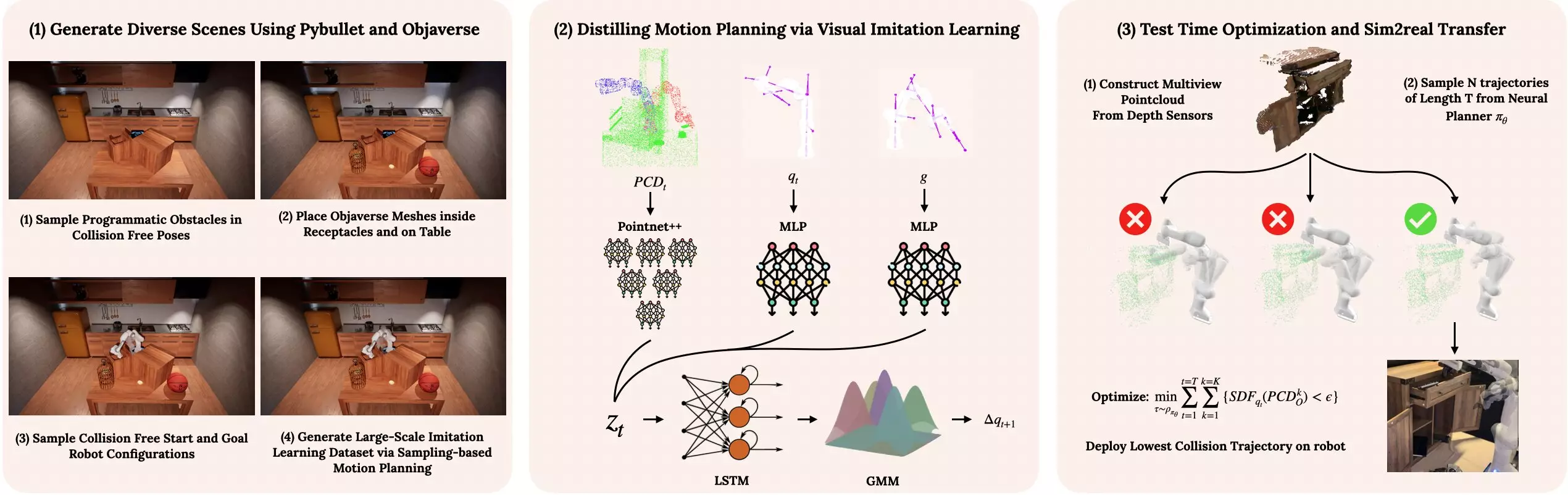
The practical implications of Neural Motion Planning extend far beyond mere task execution; they represent a transformative leap in how robots could potentially integrate into everyday life. In testing, a robotic arm utilizing this advanced motion planning maneuvered through a complex workspace without difficulty. With the help of depth sensors that provided a three-dimensional representation of the environment, the neural network directed the robotic appendage to reach specified target points while adeptly avoiding diverse obstacles, such as furniture and decor.
The agility demonstrated by the robotic arm during these trials speaks to the robustness of Neural Motion Planning. As noted by Jiahui Yang, a master’s student involved in the research, observing the system navigate various household challenges was a thrilling insight into the potential of modern robotics.
Neural Motion Planning represents not just an incremental improvement in robotics, but a revolutionary shift that could redefine the capabilities of robots within varied environments. By mimicking human learning processes and employing advanced simulation data, this approach equips robots with a novel level of flexibility and responsiveness. The road ahead remains rich with possibilities, as further enhancements to this model could lead to even broader applications. As technology continues to evolve, we may soon witness robots that do more than simply assist us; they could become integral partners in navigating the complexities of our daily lives.
Leave a Reply