
Recent advancements in soft robotics have steered researchers toward a fascinating intersection of biology and engineering, particularly the application of Turing patterns in the design of Fabric-based Soft Pneumatic Actuators (FSPAs). A study published in *Scientific Reports* illustrates how leveraging Alan Turing’s morphogenesis theory could lead to significant improvements in the production and functionality of these flexible, pressure-responsive devices. Notably, the ability to create structures that mimic natural patterns opens up a realm of possibilities for soft robotic applications in industries ranging from healthcare to entertainment.
FSPAs are unique in that they deform or move in response to applied pressure, relying on principles of inflation and deflation. This mechanism allows them to perform intricate movements while maintaining a soft interface, contrasting sharply with traditional, rigid robotic components. The capacity to interact safely with humans and delicate materials makes FSPAs invaluable in various applications, including wearable technologies, adaptive environments, and robotic architectures designed to mimic human movement. However, realizing the full potential of these devices has been hampered by the complexities associated with their design and fabrication.
One of the most pressing challenges in the development of FSPAs lies in the material used, a consideration that can dictate the actuator’s performance and adaptability. Traditionally, designers relied on isotropic materials, characterized by uniform properties, which often resulted in cumbersome trial-and-error processes to achieve desired outcomes. To address this, a team of researchers led by Dr. Masato Tanaka and Dr. Tsuyoshi Nomura from Toyota Central R&D Labs, alongside Dr. Yuyang Song from Toyota Motor Engineering, sought to innovate the existing design methodologies.
The research team adopted an automated process that harnesses the principles of morphogenesis, which Turing initially proposed in 1952. Dr. Tanaka emphasized that the goal was to develop pneumatic actuators that could achieve complex movements through low-cost and uncomplicated mechanisms. By integrating Turing’s mathematical frameworks, they created textures on the actuator’s surface, helping to simplify the movement while eliminating the reliance on specialized materials.
Turing patterns arise from reaction-diffusion systems, where two substances interact in a way that promotes one while suppressing the other, leading to stable spatial arrangements. The researchers successfully translated these biological patterns into engineering applications by employing a gradient-based orientation optimization technique for designing the surface membranes of FSPAs. This approach allowed them to manipulate material anisotropy, an essential factor in controlling how the material deforms under pressure.
The researchers’ work represents a significant leap forward, as they strategized using the nonlinear finite element method to optimize the material orientation before fabricating the actuators. They generated specific patterns that ensured uniform deformation, adhering to the Turing theory while enabling diverse motion profiles.
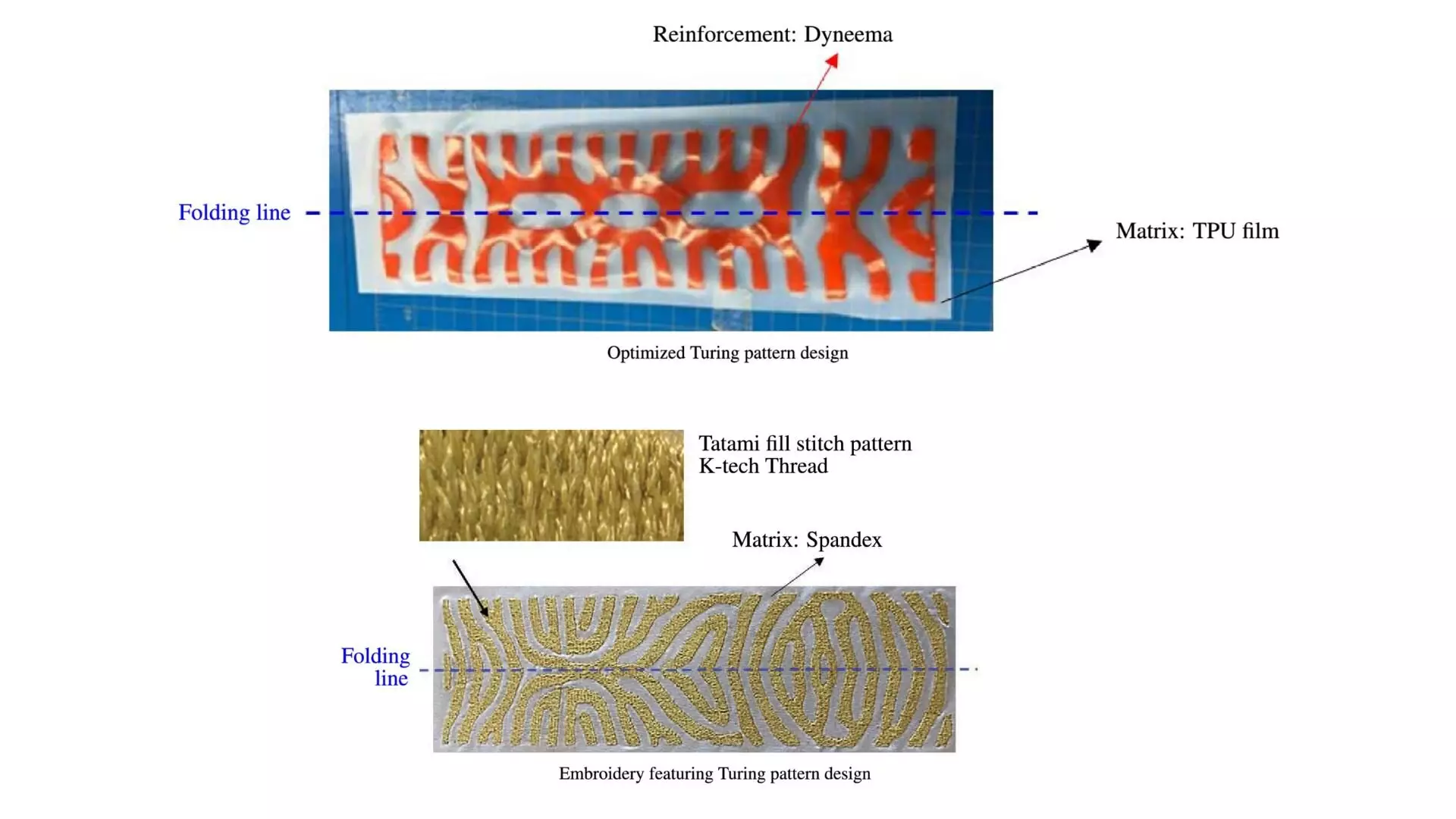
The fabrication of FSPAs was approached through two innovative techniques: heat bonding and embroidery. In heat bonding, researchers laser-cut the rigid fabric—such as Dyneema—to follow the Turing pattern and bond it to a more flexible substrate. In contrast, the embroidery technique allows for incorporating stiff thread into the soft fabric, yielding regions of varying stiffness which facilitate controlled movement. Both methods promise scalable production and reduced costs, setting the stage for widespread adoption of these advanced actuators.
Comparative analysis with traditional designs highlighted the efficiency of the new Turing pattern-based designs. Notably, for C-shaped actuators, the innovative designs reduced the distance between the actuator edges by approximately 10%, increasing the efficacy of motion. Moreover, although S-shaped bending remains a complex movement to replicate, the research team posits that their optimization approach could simplify this challenge.
Looking ahead, the researchers suggest continued exploration of Turing patterns in conjunction with advanced materials like electroactive polymers and shape memory alloys, which promise enhanced dynamic capabilities in actuators. Additionally, expanding the manufacturing techniques to accommodate larger scales through 3D printing or automated weaving could revolutionize production lines and efficiency in soft robotics.
The integration of Turing patterns into the design of FSPAs reflects a pivotal advancement in soft robotics, harnessing the elegance of nature’s designs for innovative applications in technology. This research not only elevates the potential of robotic devices but also paves the way for safer, more adaptable interactions between machines and humans. As research in this area progresses, we are likely to witness a transformative impact across various sectors, redefining the boundaries of what soft robotics can achieve.
Leave a Reply