
Imitation learning is an exciting area within robotics that aims to train robots to perform everyday tasks through detailed human demonstrations. However, the success of imitation learning frameworks depends heavily on the quality of human demonstrations, as they serve as the basis for reproducing specific movements using robotic systems.
Teleoperation systems allow humans to control the movements of robotic systems to complete specific tasks. While these systems are invaluable for collecting human demonstrations, existing teleoperation systems often struggle to reproduce complex and coordinated movements performed by humans. This limitation can hinder the effectiveness of imitation learning frameworks.
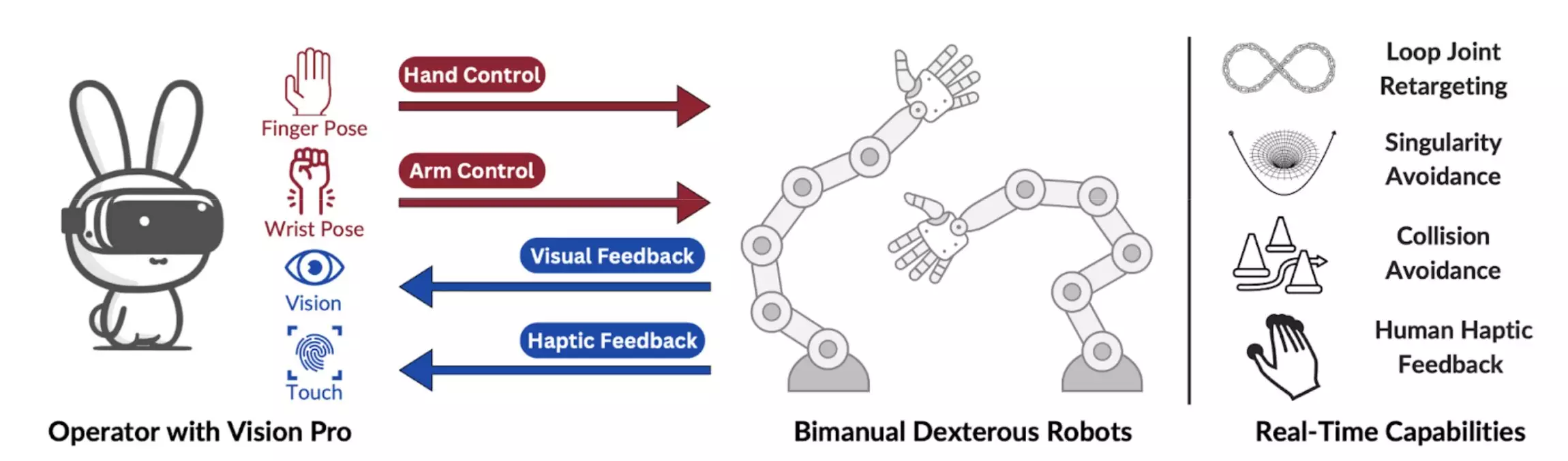
Recently, researchers at the University of California, San Diego introduced Bunny-VisionPro, a novel teleoperation system designed to enable the teleoperation of a robotic system to complete bimanual dexterous manipulation tasks. This system aims to address the shortcomings of existing teleoperation systems by focusing on dual-hand control, which is essential for tasks that require hand coordination.
Bunny-VisionPro is a portable and lightweight teleoperation system that provides users with visual and haptic feedback during operation, enhancing the immersive experience. The system is designed to enable real-time control of robotic manipulators with low latency and collision prevention. Additionally, Bunny-VisionPro consists of three key components: an arm motion control module, a hand and motion retargeting module, and a haptic feedback module.
One of the primary advantages of Bunny-VisionPro is its ability to safely control a bimanual robotic system in real-time. Unlike previous solutions, Bunny-VisionPro integrates haptics and visual feedback to enhance the teleoperation experience for human users and improve overall success rates. The system effectively balances safety and performance, enabling precise control of robot arms and multi-fingered hands in real-world applications.
The development of Bunny-VisionPro has the potential to simplify the use of teleoperation for collecting demonstrations in robotics labs. As the system gains popularity, it may inspire the development of similar immersive robotic teleoperation systems worldwide. Future research aims to enhance manipulation capabilities by leveraging the robot’s tactile information to improve precision and adaptability in robotic control algorithms.
The introduction of Bunny-VisionPro represents a significant advancement in bimanual dexterous teleoperation systems for robotics. By addressing the limitations of existing teleoperation systems and integrating innovative features like visual and haptic feedback, Bunny-VisionPro has the potential to revolutionize the way in which human demonstrations are collected for imitation learning frameworks. As researchers continue to enhance the capabilities of teleoperation systems like Bunny-VisionPro, the future of robotics looks increasingly promising.
Leave a Reply