
In a recent study conducted by researchers at Improbable AI Lab and Massachusetts Institute of Technology (MIT), a new two-finger robotic gripper has been designed to enhance the manipulation capabilities of robots. The main objective of this innovation is to enable robots to effectively pick up objects with different shapes and textures and place them in specified locations. The researchers focused on creating a robotic finger capable of performing a variety of everyday tasks, emphasizing the need for the fingers to be compact yet functional.
The robotic gripper consists of two fingers that closely resemble human fingers in terms of size and shape. This similarity allows the robotic fingers to bend and grasp objects in a manner similar to how a human hand would. The team aimed to develop fingers that could handle simple tasks like picking up objects and placing them in specific locations, rather than complex manual tasks. While the initial design only incorporated 2 degrees of freedom, the researchers are considering expanding to more fingers in the future to enhance the gripper’s capabilities.
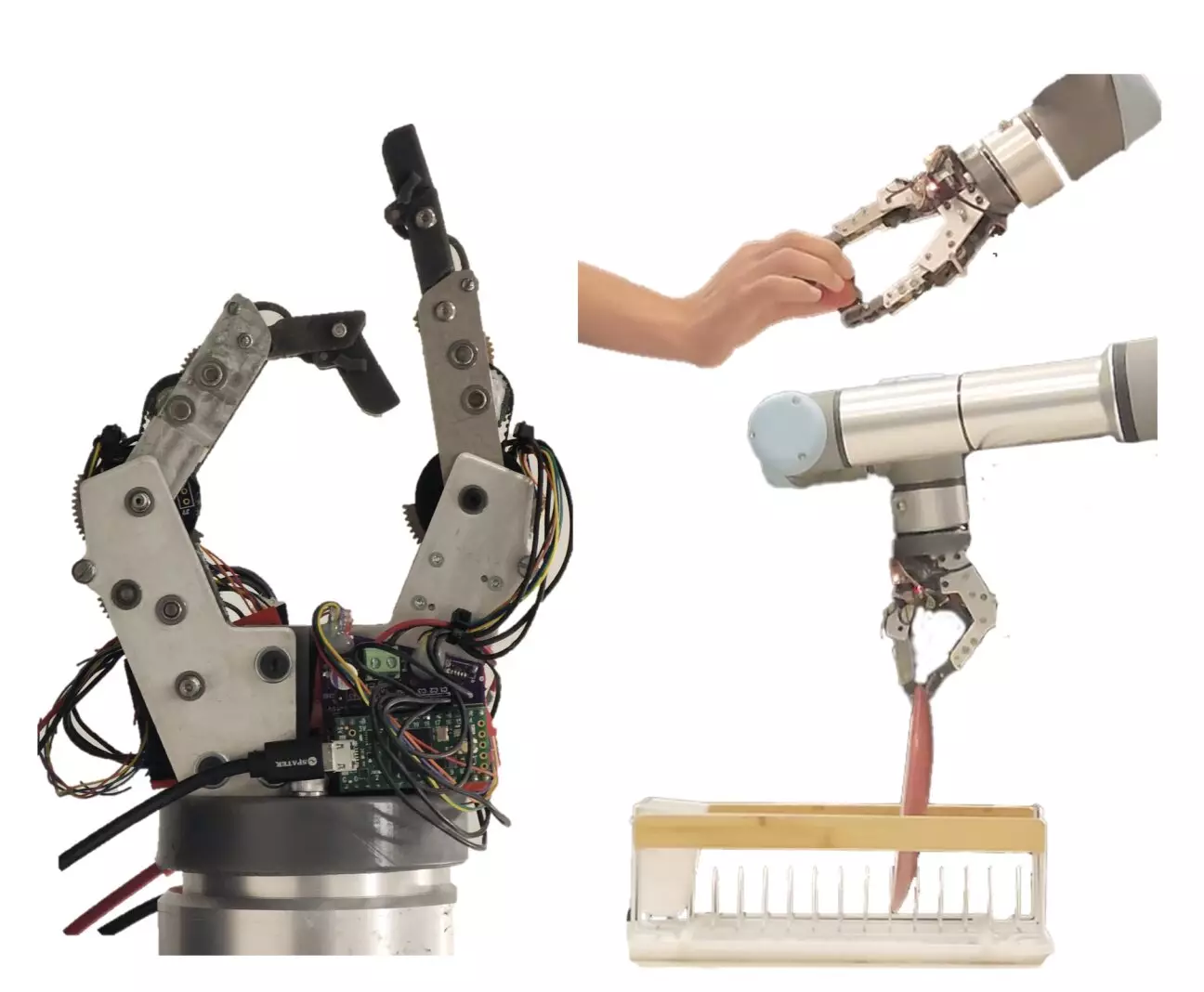
To evaluate the performance of their two-finger gripper, the researchers conducted a series of real-world experiments. These experiments focused on assessing the speed, compliance, and force applied by the system while completing basic “pick-and-place” tasks. The researchers tested the gripper by picking and placing dishes in a rack, handling thin and flat objects like paper, and delicately grasping objects such as strawberries. The results of these tests were promising, as the gripper successfully completed all three tasks, indicating its potential for use in household robots.
Potential for Future Improvements
While the current design of the two-finger robotic gripper has shown promising results in basic tasks, there is still room for improvement. The researchers acknowledge that further enhancements could be made to the gripper’s design to expand its capabilities and performance. By exploring the use of additional fingers or incorporating more degrees of freedom, the researchers aim to develop a more versatile gripper that can handle a wider range of daily tasks. Additionally, ongoing research and development efforts will focus on refining the design and assessing the gripper’s performance in various scenarios to maximize its utility in real-world applications.
The development of robotic grippers is crucial for enabling robots to effectively manipulate objects in different environments. The innovative two-finger robotic gripper designed by researchers at Improbable AI Lab and MIT demonstrates the potential for enhancing the manipulation capabilities of robots in everyday tasks. By further refining the design and exploring new avenues for improvement, the researchers aim to create a versatile gripper that can support the development of advanced household robots capable of performing a wide range of tasks.
Leave a Reply